brushless-gimbal-BruGi 改造ファームウェア置き場
------------------------------------------------------------
本家BruGiファームウェアはhttp://sourceforge.net/projects/brushless-gimbal-brugi/にて配布されています。
当サイトでは本家ファームウェアを私(hachikazuya)が弄くった改造ファームウェアを置いています。
改造ファームウェアを使用した動画はhttp://www.youtube.com/user/hachikazuyaで公開しています。
------------------------------------------------------------
■注意事項■ 改造ファームウェアの使用は各自の自己責任でお願いします。何が起きても私は責任持ちません。
ファームウェアの書き換えには Arduino IDEを使用します。
使い方その他はGoogleで検索してください。
------------------------------------------------------------
改造ファームウェアは 2種類あります。
●Yaw軸制御用ファームウェア
●Pitch&Roll軸制御用ファームウェア
3軸Brushless Gimbalを作るには
●Yaw軸用コントローラー+IMUボード
●Pitch&Roll軸用コントローラー+IMUボード
の組み合わせが必要です。
SimpleBGC系のような1個のIMUボードで3軸制御することはできません。
------------------------------------------------------------
■■■■Yaw軸制御用ファームウェア■■■■
本家ファームウェアはPitch&Roll軸の制御しかできませんが
こちらの改造ファームウェアを使用することによりYaw軸制御が可能になります。
※Yaw軸制御専用になります。Yaw+Pitch or Yaw+Roll のような組み合わせはできません。
【050 r207版 140723】_BruGi_050_r207_yaw140723.zip
140202版に比べて、かなり内部が違っています。各種パラメータにも互換性が無い部分が多々あります。
●IMUボードの垂直置きに対応しました。
『IMUボードの置き方によるチェック欄の入れ方』を参考にしてください。
[Gyro Update]のチェックを外すと垂直置き対応になります。
(本来の[Gyro Update]はデバッグ以外では使用しない項目です)
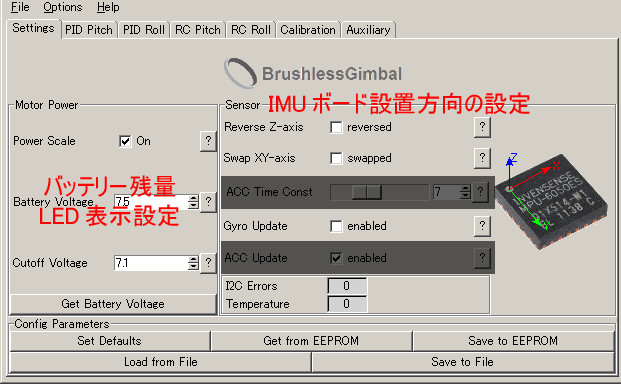
●バッテリー残量をLEDで確認できるようになりました。
※残量確認LEDが必要なければこの項目は無視してOK
120Ω(使用LEDにより異なります) / 2.2kΩ / 10kΩ のカーボン抵抗と緑色LEDが必要です。
コントローラーの『VCC / A2 / A3 / GND』を利用します。
【1】A3とGND間に2.2kΩ抵抗を付けます
【2】VCC(無ければバッテリーの+側)とA3間に10kΩ抵抗を付けます
【3】A2に120Ω抵抗を付け、片方の足に緑色LEDの+側を付け、LEDの−側をGNDへ付けます
【4】GUIでLEDの光らせ方を設定します
?[Power Scale]にチェックを入れます
?[Battery Voltage]には「そろそろバッテリー交換の準備しよう」という値を入力します
?[Cutoff Voltage]には「もう限界!今すぐバッテリー交換!」という値を入力します
例えばこの設定であれば、7.5VになるとLEDがゆっくり点滅、7.1Vになれば高速点滅します。
ちなみに?[Get Battery Voltage]を押すと現在のバッテリー電圧が[Battery Voltage]に表示されます
●Follow Mode無効化ボタンに対応しました。
A1とGND間にタクトスイッチを付けます
スイッチを押しているあいだはFollow Modeが効かなくなります。
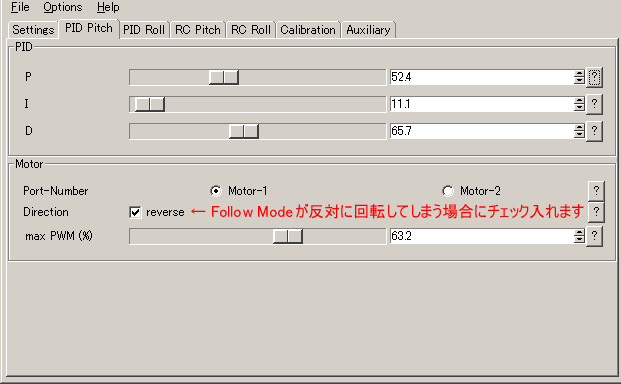
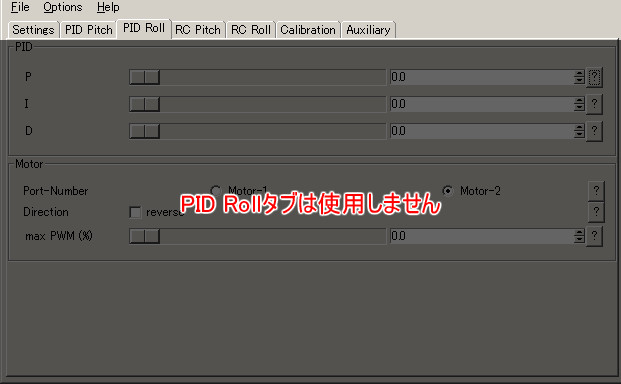
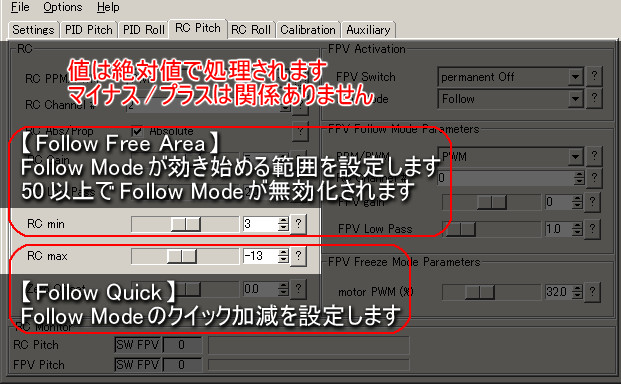
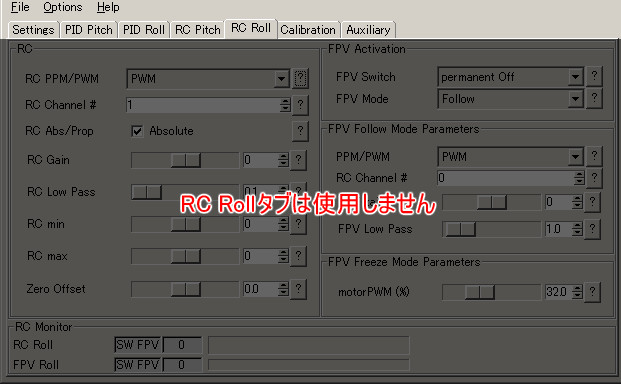
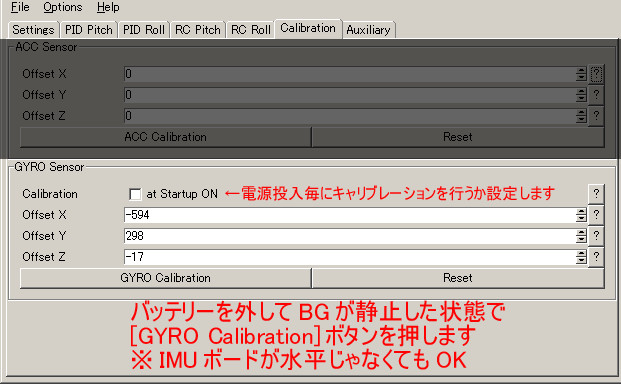
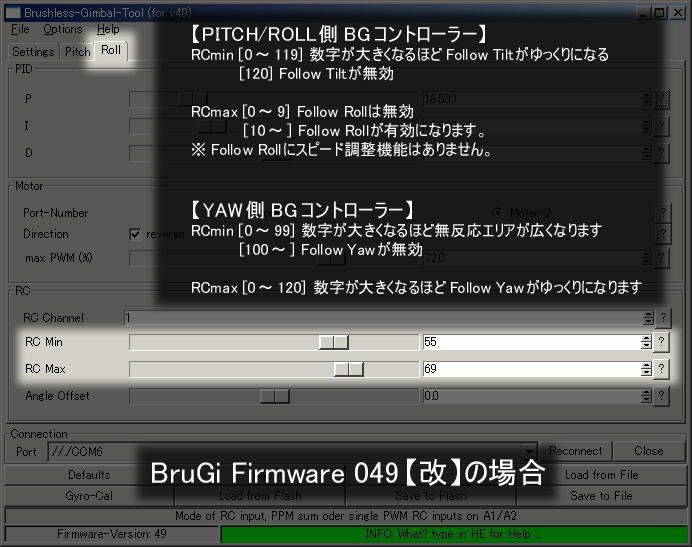
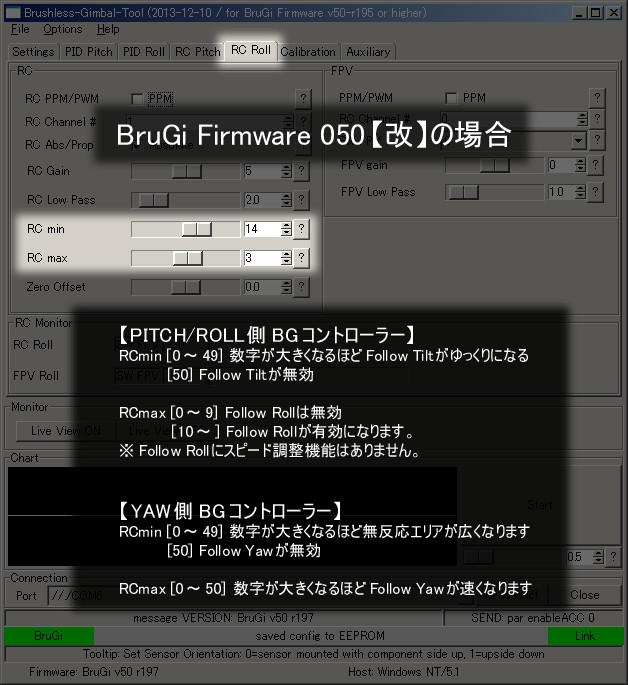
●GUIの各種タブの設定項目は以下のようになります。

------------------------------------------------------------
■■■■Pitch/Roll軸制御用ファームウェア■■■■
※IMUボードの垂直置きに対応中。公開時期未定。
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
以下は公開から時間が経ってしまい、どれがどんな動きなのか完全に忘れてしまったので完全サポート外です
□□□ 旧式 YAW軸制御用ファームウェア □□□
Yaw軸モーターの軸とIMUのZ軸が同じ向きになるようIMUを設置してください。
------------------------------------------------------------
【050 r207版 140202】_BruGi_050_r207_yaw140202.zip
r207ベースのYAW化ファームです。
電源ONからの起動時間が早くなりました
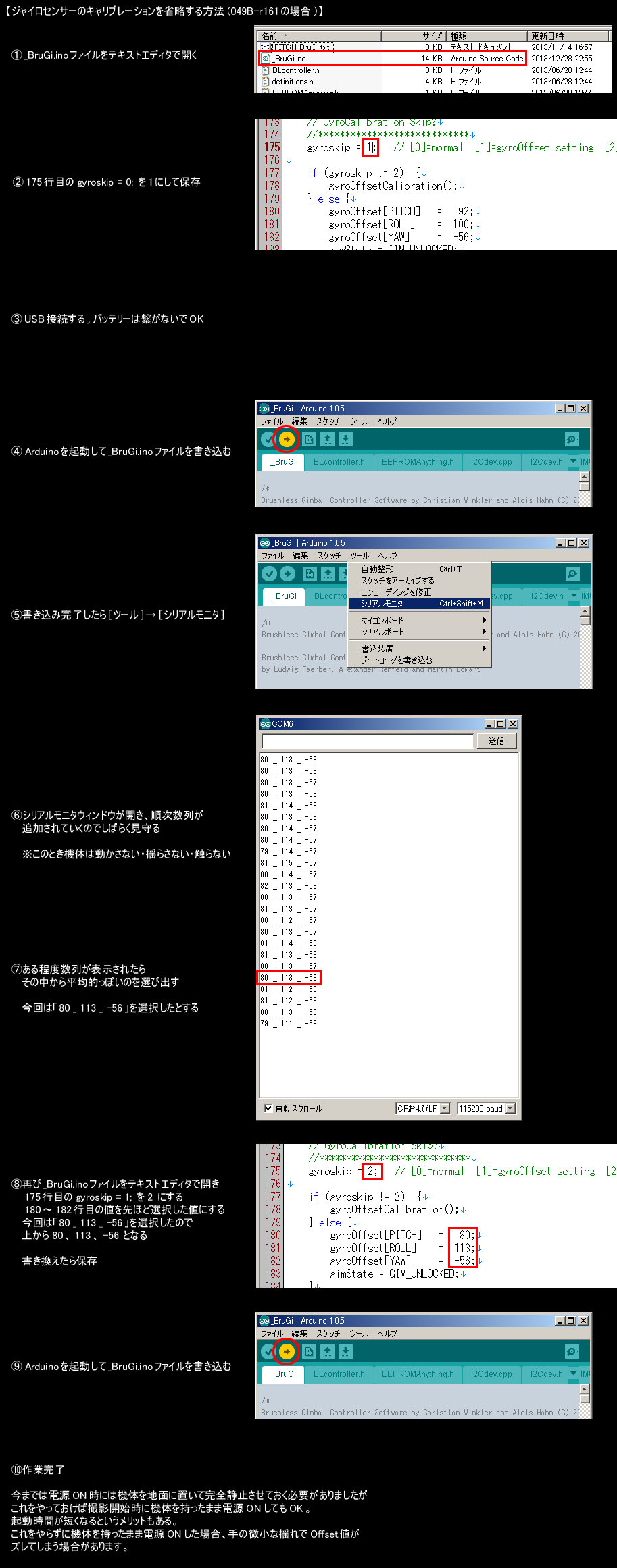
【049B r161版 131228】_BruGi_049B_r161_yaw131228.zip
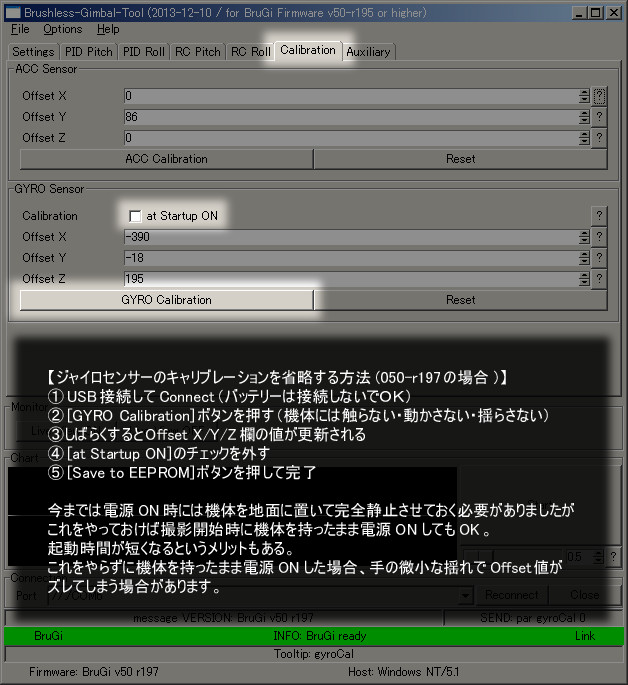
【050 r197版 140118】_BruGi_050_r197_yaw13228-reupload140118.zip
050 r197のYAW化に成功しました。ROLLタブのRCmin/RCmax値は新たに設定し直してください。
049版と050版とではYAW機能に特に違いはありませんが、ROLLタブのRCmin/RCmax値については互換性ありません。
センサーのキャリブレーション値が異常な値になり、静止せずにグルグル回ったりしてしまうといったバグ修正。
また、別の原因からグルグル回ってしまうバグがあります。
その場合はIMUをZ軸を中心に180度回転させて設置しなおすか、ブラシレスモーターの3pinの1番と3番の位置を入れ替えると解決できるかもしれません。
【049B r161版 131219】BruGi_049B_r161_hachikazuya131219.zip
バグからの復帰ルーチン処理が終わった直後に再びバグが発生する場合があったので修正しました。・・・・修正できてるはず、たぶん(汗)
GUIでFollowYAW機能を無効(RcMinを100以上に設定)にしたのにきちんと無効化されてなかったのを修正。
【049B r161版 131217】BruGi_049B_r161_hachikazuya131217.zip
クイック加減に関する計算方法を見直しました。改めてGUIで設定値を調整してください。
FollowYAWに関するソースコードで意味のない箇所などを修正、掃除しました。
http://www.youtube.com/watch?v=yIKtghsdYF4
【049B r161版 131213】BruGi_049B_r161_hachikazuya131213.zip
センター付近で極僅かにブレるバグがあることを確認、対処しました。
クイック加減に関する計算方法を見直しました。改めてGUIで設定値を調整してください。
上記2つの修正により、直進性が向上すると思います。
【049B r161版 131208】BruGi_049B_r161_hachikazuya131208.zip
http://www.youtube.com/watch?v=CFXWJl255p4
【049B r161版 131026】BruGi_049B_r161_hachikazuya131026.zip
http://www.youtube.com/watch?v=63K-JCdt_wY
------------------------------------------------------------
□□□ 旧式 Pitch&Roll軸制御用ファームウェア □□□
------------------------------------------------------------
【050 r207版 140213】_BruGi_050_r207_pitch140213.zip
説明動画→http://www.youtube.com/watch?v=puFAmkVinLA
Follow ALL Mode用にノーマル・ローアングル切り替えスイッチを用意しました。
GUIの[Live View] [Start Waveform View]の利用が不可能になりました(プログラム容量確保のため)。
【050 r207版 140205】_BruGi_050_r207_pitch140205.zip
Ver.140202にて、電源ON後いつまで経っても準備完了の合図(一瞬ビクビクッとする)が無い場合があったので対処しました。
今回の修正で電源ON後、約10秒経っても水平を感知できない場合は強制的に準備完了させるようにしました。
【050 r207版 140202】_BruGi_050_r207_pitch140202.zip
いろいろ機能を追加しました。
説明動画http://www.youtube.com/watch?v=yovm3dDhFyYをご覧下さい。
サーボテスターの動作についてはMOMOKO氏の
『ステディカムとコプター用ジンバルを共用にしました。』に分かり易く書かれています。
【050 r197版 140118】_BruGi_050_r197_pitch131228-follow_onoff.zip
2013/12/28にUPした物にFollow PITCHのON/OFF機能を付け足したバージョンです。
<Follow PITCH ON/OFFの仕方>
1:PITCH制御コネクタ(A1)にサーボテスター等を接続します
2:電源ON
3:サーボテスターがちょうどセンターポジションならばFollow PITCHはONのままです
4:サーボテスターをちょっと回します
5:Follow PITCHがOFFになります
6:以降、電源OFFまでPITCHコントロールはサーボテスターで行います
追記:Follow PITCHがOFFになったあとに外乱などで復帰ルーチンが作動すると再びFollow PITCHがONになります。
GUIのPITCHタブのRCmin・RCmax値は±127を超えないようにしてください。超えると値がバグるようです。
GUIのAuxiliaryタブ中の一部はおそらく機能しません。
【049B r161版 131228】_BruGi_049B_r161_pitch131228.zip
【050 r197版 131228】_BruGi_050_r197_pitch131228.zip
Follow ROLLをおまけ搭載しました。おまけですのでバグだらけです。
ROLLタブのRCmaxを10以上にするとFollow ROLLが有効になります。
Follow ROLLにスピード調整機能はありません。
049版と050版とではPITCH/ROLL機能に特に違いはありませんが、ROLLタブのRCmin/RCmax値については互換性ありません。
その他、ちょこちょこ修正しました。
【050 r197版 131217】_brugi050_r197_followpitch131217.zip
BruGi Ver.050 r197をベースにFollow PITCH機能を追加しました。
Ver.049B r161からVer.050 r197へアップしたためGUIもr197用のを使用する必要があります。
GUIはhttp://code.google.com/p/brushless-gimbal/からr197をDownloadして下さい。
また、設定値が初期化されますので念のため現在値をメモしておいてください。
Follow PITCH機能についてはr161との違いはほぼ無いため、無理にアップデートする必要はありません。
http://www.youtube.com/watch?v=yIKtghsdYF4
【050 r161版 131119】_brugi049b_r161_followpitch131119.zip
http://www.youtube.com/watch?v=i6FKB4ZGZhE
------------------------------------------------------------
------------------------------------------------------------